[TOC]
这是我首次读到 关于 hawkes过程的用transformer实现的,当然后面也是有另外一个新的,那么我就在这里简单介绍一下这篇论文。
首先我们先区分一下 几种算法之间的区别
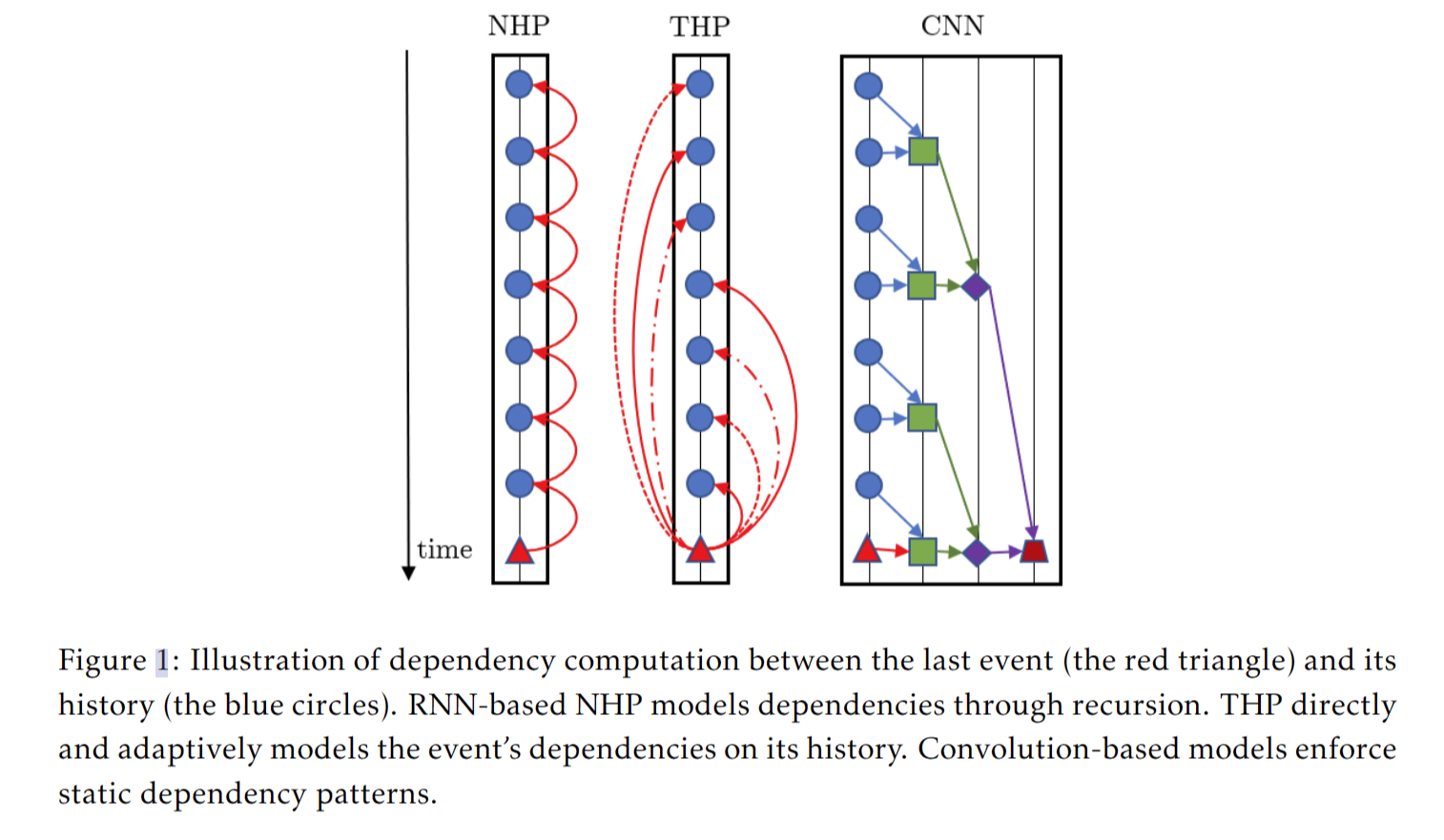
THP 在计算所有事件的依赖关系时允许完全并行,即任意两个事件对之间的计算是相互独立的。这产生了一个表现出强大效率的模型。
将架构推广到连续时间域
在这里我们就不去介绍Hawkes的简单介绍,你可以去前面的文章中去查看Hawkes的具体算法
We introduce our proposed Transformer Hawkes Process. Suppose we are
given an event sequence
Transformer Hawkes Process
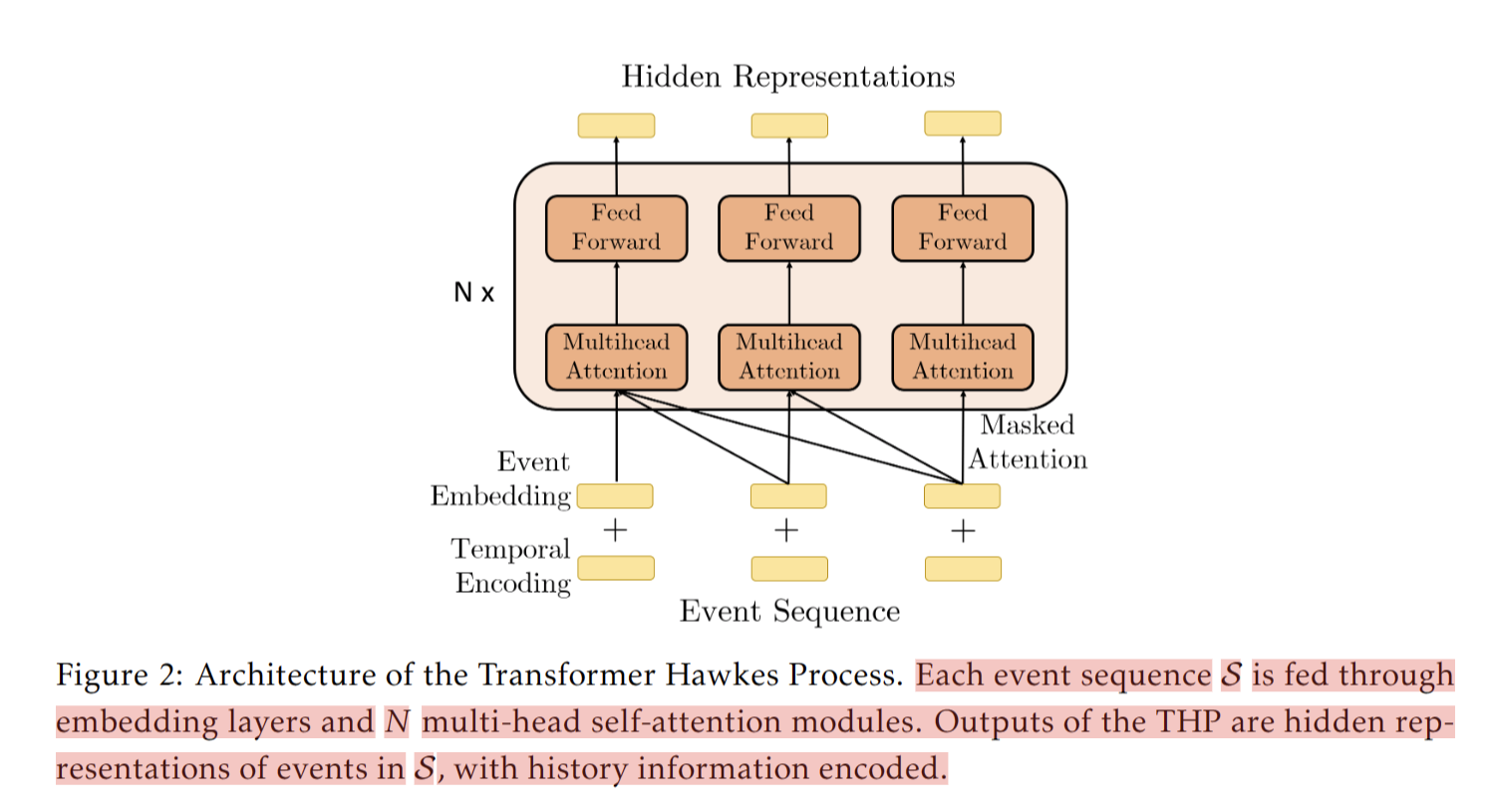
每个事件序列 S 通过嵌入层和 N 个多头自注意力模块馈送。THP 的输出是 S 中事件的隐藏表示,编码历史信息。
下面和transformer里面的相同,都是加入位置编码
也存在其他的方法:对于线性序列,边可以捕获有关输入元素之间的相对位置差异的信息。我们考虑的最大相对位置被剪裁为 k 的最大绝对值。我们假设精确的相对位置信息在某些距离之外没有用处。裁剪最大距离也使模型能够泛化到训练期间没有看到的序列长度。(相对位置)
todo: 可以考虑怎样去处理创建一个新的属于自己的位置时间编码
我们训练了一个嵌入矩阵U(M×K)对于事件的类型type k,其中 U 的第 k 列是事件类型 k 的 M 维嵌入
kj我们指定为一个one-hot向量,用来指定编号。则每个事件的嵌入就是Ukj
对于每一个事件来说(tj,kj)时间编码
z(t**j) 和事件嵌入Ukj 为RM。然后指定事件序列
Z是事件时间编码的集合
X的每一行对应于序列中特定事件的嵌入。
下面通过自注意力模块传递X
然后进入feed forward 前馈网络
结果H包含输入序列中所有事件的隐藏表示,其中每一行对应一个特定事件。
Continuous Time Conditional Intensity
时间点过程动力学由连续条件强度函数描述。5
只为离散的时间戳生成隐藏表示,相关强度也是离散的。因此需要一个插值的连续时间强度函数。
其中k是指event type Ht是指到目前为止需要考虑的历史的集合
时间定义在区间 t ∈ [tj , tj+1) 上,fk (x) 为softplus 函数。确保强度为正
“current”影响是两个观察到的时间戳 tj 和 tj+1 之间的插值,αk 调节插值的重要性。事实上,除了观察到的事件 {(tj , kj )} 之外,等式 6 在任何地方都是连续的。
“history”由两部分组成:一个向量 wk,它将 THP 模型的隐藏状态转换为标量,隐藏状态 h(t)本身将过去事件编码到时间 t。
“base”强度表示不考虑历史信息的事件出现的概率。
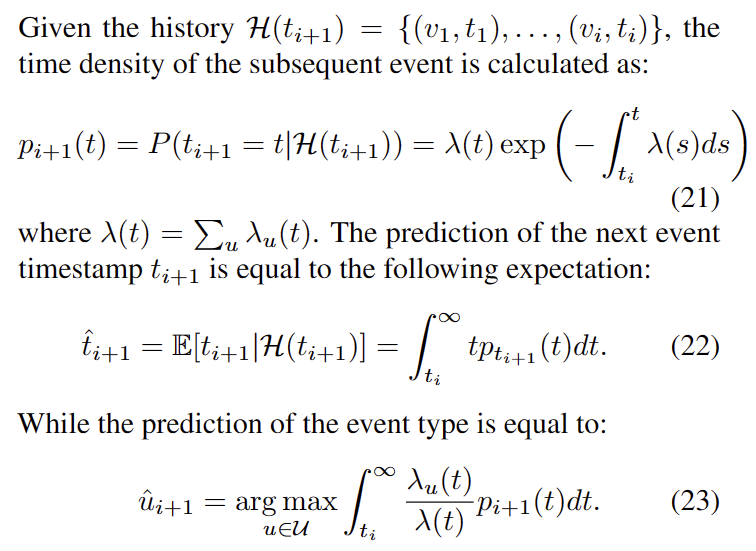
根据上面的强度函数,可以根据此来进行预测
自注意力机制里面的 差不多
training
对于观察区间 [t1, tL] 上的任何序列 S,给定其条件强度函数 λ(t|Ht
),对数似然为
非事件对数似然
Structured Transformer Hawkes Process
THP 相当通用,可以合并额外的结构知识。我们考虑多个点过程,其中其中任何一个都可以相关。这种关系通常由图 G = (V , E) 描述,其中 V 是顶点集,每个顶点都与一个点过程相关联。此外,E 是边集,其中每条边表示对应两个顶点之间的关系信息。
这不就是三元组
?难道这就是时序知识图谱应用ght的由来?
图编码顶点之间的关系,并进一步表示潜在的交互。建议使用单个 THP
对所有点过程进行建模,顶点点过程的异质性由顶点嵌入方法处理。
可以堆叠多个多头自注意力模块以学习高级表示,这是一种能够学习顶点之间复杂相似性的特征。
此外,顶点相似度矩阵能够对更复杂的结构化数据进行建模,例如动态演化图上的序列。
其中每种类型的事件都有自己的强度,我们为每个事件类型和每个顶点定义了一个不同的强度函数。具体来说,
这里 Lgraph(V, Ω) 是一个正则化项,当 vj 和 vk 之间存在边时,它鼓励 Vj ΩVk 变大。这意味着如果两个顶点在图 G 中连接,则正则化器将促进它们之间的注意力,反之亦然。请注意,在最简单的情况下,方程式中的 A 可以是邻接矩阵的一些变换,即如果 (vi , vj ) ∈ E,则 Aij = 1,否则为 0。然而,我们认为这个约束过于严格,即一些连接的顶点可能不会表现相似。因此,我们将图视为指导,并引入正则化项,鼓励 A 与邻接矩阵相似,但不强制执行它。这样,我们的模型更加灵活
experiment
每个注意力头使用不同的模式来捕获依赖关系。此外,虽然第一层的注意力头倾向于关注单个事件,但最后一层的注意力模式更加均匀分布。这是因为更深层的特征已经由浅层的注意力头转换。
关系信息共享可以帮助模型捕获潜在动态。当训练事件数量较少时,模型无法构建足够的信息共享启发式
第二种方法是使用基于空间接近度构建的邻域图
通过基于顶点的空间接近度从注意力头的跨度中消除这种依赖关系成功地解决了这个问题
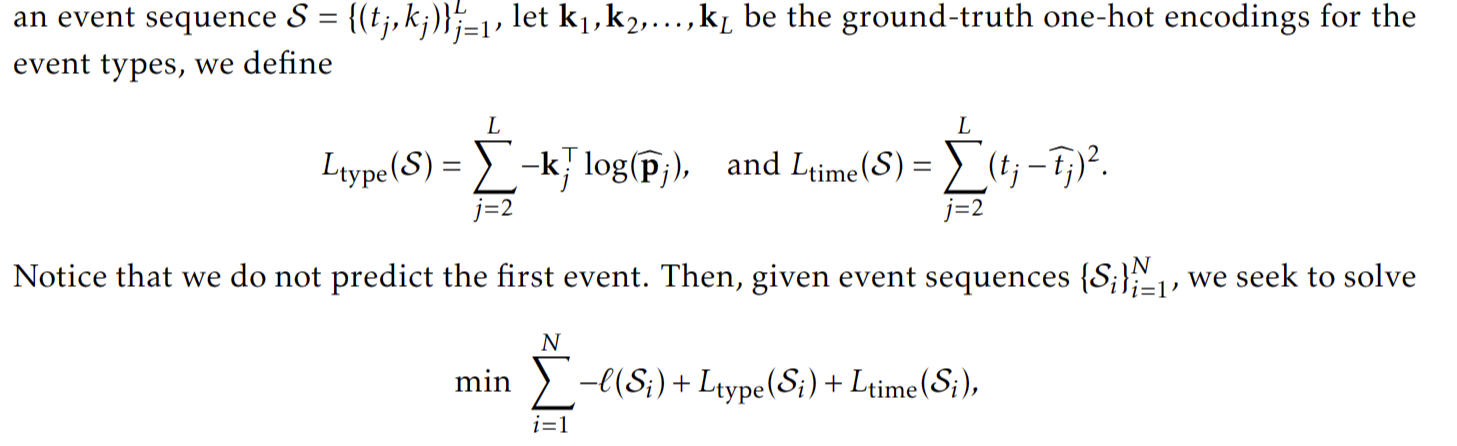
事件的类型和时间的预测。
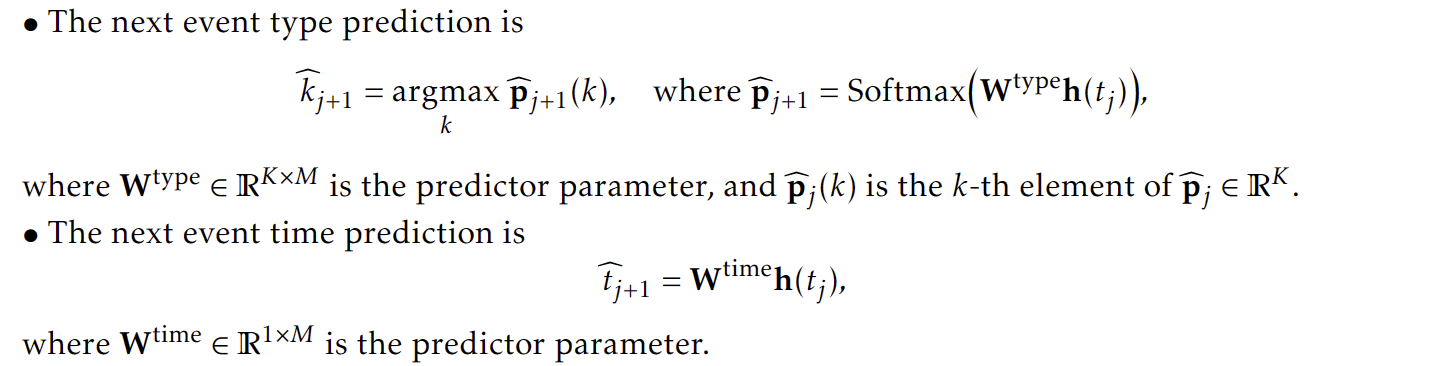
损失函数配备了用于事件类型预测的交叉熵项和用于事件时间预测的均方误差项
为了评估模型性能,我们根据每个保留事件 (tj , kj ) 的历史 Hj 来预测每个保留事件 (tj , kj ),即对于长度为 L 的测试序列,我们进行 L-1 个预测。我们通过均方根误差 (RMSE) 的准确性和事件时间预测来评估事件类型预测。